Search results
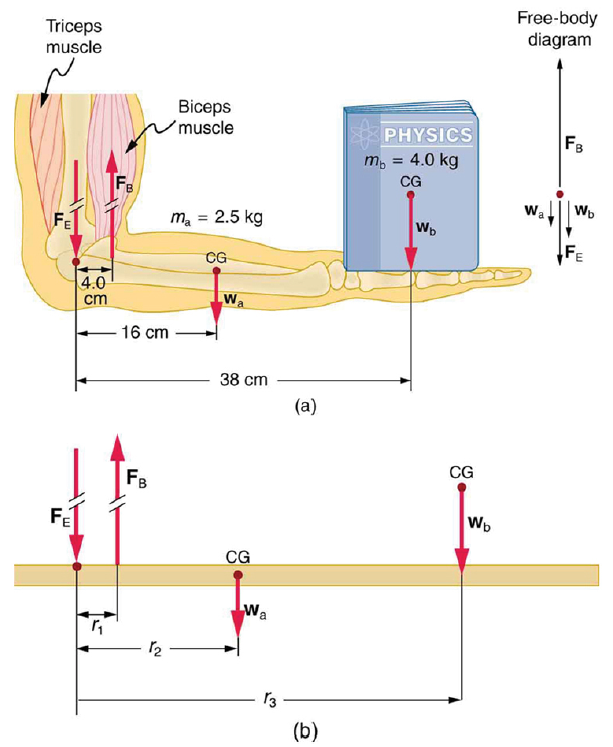
(a) The figure shows the forearm of a person holding a book. The biceps exert a force FB to support the weight of the forearm and the book. The triceps are assumed to be relaxed. (b) Here, you can view an approximately equivalent mechanical system with the pivot at the elbow joint
Strategy
There are four forces acting on the forearm and its load (the system of interest). The magnitude of the force of the biceps is FB, that of the elbow joint is FE, that of the weights of the forearm is wa , and its load is wb. Two of these are unknown FB, so that the first condition for equilibrium cannot by itself yield FB . But if we use the second condition and choose the pivot to be at the elbow, then the torque due to FE is zero, and the only unknown becomes FB .
Solution
The torques created by the weights are clockwise relative to the pivot, while the torque created by the biceps is counterclockwise; thus, the second condition for equilibrium (net τ = 0) becomes
Note that sin θ = 1 for all forces, since θ = 90º for all forces. This equation can easily be solved for FB in terms of known quantities,yielding. Entering the known values gives
which yields
Now, the combined weight of the arm and its load is known, so that the ratio of the force exerted by the biceps to the total weight is
Discussion
This means that the biceps muscle is exerting a force 7.38 times the weight supported.
Reference : OpenStax College,College Physics. OpenStax College. 21 June 2012.
http://openstaxcollege.org/textbooks/college-physics
Creative Commons License : http://creativecommons.org/licenses/by/3.0/
Precession is a change in the orientation of the rotational axis of a rotating body. In an appropriate reference frame it can be defined as a change in the ... more
Precession is a change in the orientation of the rotational axis of a rotating body. In an appropriate reference frame it can be defined as a change in the ... more
In the wheelbarrow of the following figure the load has a perpendicular lever arm of 7.50 cm, while the hands have a perpendicular lever arm of 1.02 m.(a) What upward force must you exert to support the wheelbarrow and its load if their combined mass is 45.0 kg? (b) What force does the wheelbarrow exert on the ground?
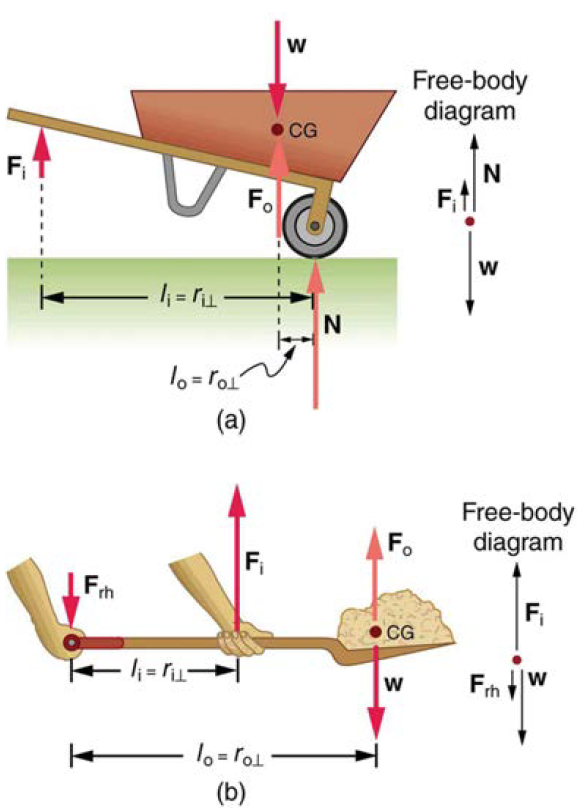
(a) In the case of the wheelbarrow, the output force or load is between the pivot and the input force. The pivot is the wheel’s axle. Here, the output force is greater than the input force. Thus, a wheelbarrow enables you to lift much heavier loads than you could with your body alone. (b) In the case of the shovel, the input force is between the pivot and the load, but the input lever arm is shorter than the output lever arm. The pivot is at the handle held by the right hand. Here, the output force (supporting the shovel’s load) is less than the input force (from the hand nearest the load), because the input is exerted closer to the pivot than is the output.
Strategy
Here, we use the concept of mechanical advantage.
Discussion
An even longer handle would reduce the force needed to lift the load. The MA here is:
Reference : OpenStax College,College Physics. OpenStax College. 21 June 2012.
http://openstaxcollege.org/textbooks/college-physics
Creative Commons License : http://creativecommons.org/licenses/by/3.0/
Torque, moment or moment of force (see the terminology below) is the tendency of a force to rotate an object about an axis. In addition to the tendency to ... more
Precession is a change in the orientation of the rotational axis of a rotating body. In an appropriate reference frame it can be defined as a change in the ... more
Torque, moment or moment of force , is the tendency of a force to rotate an object about an axis. The unbalanced torque on a body along axis of rotation ... more
A screw is a mechanism that converts rotational motion to linear motion, and a torque (rotational force) to a linear force. It is one of the six classical ... more
Torque, moment, or moment of force is the tendency of a force to rotate an object about an axis, fulcrum, or pivot.
Moment of inertia is the mass
... more
Torque, is the tendency of a force to rotate an object about an axis, fulcrum, or pivot. Just as a force is a push or a pull, a torque can be thought of as ... more
A ball screw is a mechanical linear actuator that translates rotational motion to linear motion with little friction. A threaded shaft provides a helical ... more
A leadscrew (or lead screw), also known as a power screw or translation screw, is a screw used as a linkage in a machine, to translate turning motion into ... more
A leadscrew (or lead screw), also known as a power screw or translation screw, is a screw used as a linkage in a machine, to translate turning motion into ... more
A leadscrew (or lead screw), also known as a power screw or translation screw, is a screw used as a linkage in a machine, to translate turning motion into ... more
A leadscrew (or lead screw), also known as a power screw or translation screw, is a screw used as a linkage in a machine, to translate turning motion into ... more
When current is passed through the loops, the magnetic field exerts torque on the loops, which rotates a shaft. Electrical energy is converted to ... more
A ball screw is a mechanical linear actuator that translates rotational motion to linear motion with little friction. A threaded shaft provides a helical ... more
A physical dipole consists of two equal and opposite point charges An electric dipole is a separation of positive and negative charges.The direction of an ... more
Moment of inertia is the mass property of a rigid body that determines the torque needed for a desired angular acceleration about an axis of rotation. ... more
A crank is an arm attached at right angles to a rotating shaft by which reciprocating motion is imparted to or received from the shaft. It is used to ... more
A leadscrew (or lead screw), also known as a power screw or translation screw, is a screw used as a linkage in a machine, to translate turning motion into ... more
Nodal precession is the precession of an orbital plane around the rotation axis of an astronomical body such as Earth. This precession is due to the ... more
A screw is a mechanism that converts rotational motion to linear motion, and a torque (rotational force) to a linear force. It is one of the six classical ... more
Energy transmission with a rotating shaft is very common in engineering practice. Often the torque T applied to the shaft is constant which means that the ... more
Far away from a magnet, its magnetic field is almost always described (to a good approximation) by a dipole field characterized by its total magnetic ... more
As applied to a rigid body,a standard definition of mechanical equilibrium is:
A rigid body is in mechanical equilibrium when the sum of all forces on
... more
A typical small rescue helicopter, like the one in the Figure below, has four blades, each is 4.00 m long and has a mass of 50.0 kg. The blades can be approximated as thin rods that rotate about one end of an axis perpendicular to their length. The helicopter has a total loaded mass of 1000 kg. (a) Calculate the rotational kinetic energy in the blades when they rotate at 300 rpm. (b) Calculate the translational kinetic energy of the helicopter when it flies at 20.0 m/s, and compare it with the rotational energy in the blades. (c) To what height could the helicopter be raised if all of the rotational kinetic energy could be used to lift it?
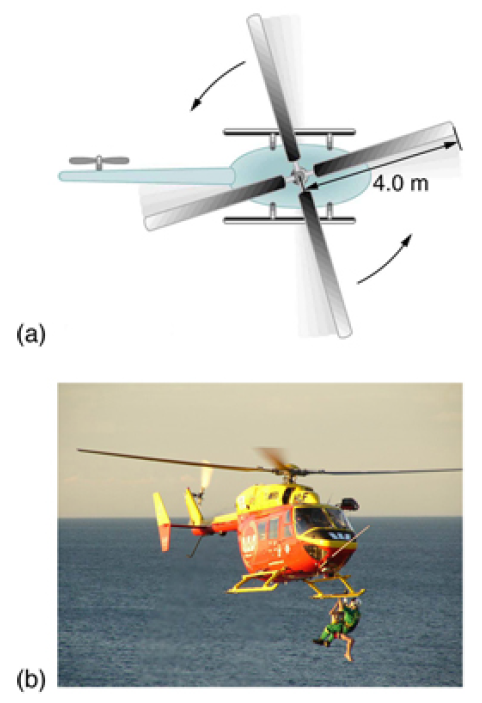
The first image shows how helicopters store large amounts of rotational kinetic energy in their blades. This energy must be put into the blades before takeoff and maintained until the end of the flight. The engines do not have enough power to simultaneously provide lift and put significant rotational energy into the blades.
The second image shows a helicopter from the Auckland Westpac Rescue Helicopter Service. Over 50,000 lives have been saved since its operations beginning in 1973. Here, a water rescue operation is shown. (credit: 111 Emergency, Flickr)
Strategy
Rotational and translational kinetic energies can be calculated from their definitions. The last part of the problem relates to the idea that energy can change form, in this case from rotational kinetic energy to gravitational potential energy.
Solution for (a)
We must convert the angular velocity to radians per second and calculate the moment of inertia before we can find Er . The angular velocity ω for 1 r.p.m is
and for 300 r.p.m
The moment of inertia of one blade will be that of a thin rod rotated about its end.
The total I is four times this moment of inertia, because there are four blades. Thus,
and so The rotational kinetic energy is
Solution for (b)
Translational kinetic energy is defined as
To compare kinetic energies, we take the ratio of translational kinetic energy to rotational kinetic energy. This ratio is
Solution for (c)
At the maximum height, all rotational kinetic energy will have been converted to gravitational energy. To find this height, we equate those two energies:
Discussion
The ratio of translational energy to rotational kinetic energy is only 0.380. This ratio tells us that most of the kinetic energy of the helicopter is in its spinning blades—something you probably would not suspect. The 53.7 m height to which the helicopter could be raised with the rotational kinetic energy is also impressive, again emphasizing the amount of rotational kinetic energy in the blades.
Reference : OpenStax College,College Physics. OpenStax College. 21 June 2012.
http://openstaxcollege.org/textbooks/college-physics
Creative Commons License : http://creativecommons.org/licenses/by/3.0/
A compound pendulum (or physical pendulum) is one where the rod is not massless, and may have extended size; that is, an arbitrarily shaped rigid body ... more
...can't find what you're looking for?
Create a new formula
Calculate the force the biceps muscle must exert to hold the forearm and its load as shown in the figure below, and compare this force with the weight of the forearm plus its load. You may take the data in the figure to be accurate to three significant figures.